Die Klasse dient zum spezifischen Verarbeiten eines Objektes.
Das Objekt wird mit em Konstruktor gebildet Klasse::Klasse()
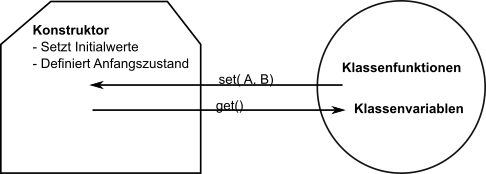
Um auf das Objekt zuzugreifen, es zu verändern oder den Zustand seiner Variablen zu kennen braucht man Klassen-Funktionen Klasse::funktion() .
Auf alle Klassenvariablen kann man nur über das Objekt zugreifen objekt.variable .
Bsp Huffman Map
– Konstruktor bildet die Map- hm.readToken(„stream.txt“) Daten werden von aussen eingegeben und lokal im Objekt gespeichert
– hm.getBitValue() Lokale Varibale wird verarbeitet und ausgegeben
– hm.getZeros() Andere Variable wird verabeitet und ausgegeben