Herunterladen
git fetch upstream
Herunterladen und zusammenführen mit local
git pull [origin master] // fetch und merge
Dateien auf Github hochladen
git push [origin master] // origin bedeutet remote auf github
git push [ <ziel> <von wo>]
Unterscheidung remote/local
Github ist ein entferntes Verzeichnis auf dem Internet. Deshalb bezieht sich der Begriff remote auf Github. Steht nichts vor dem Branch-Name, so ist es local.
$git branch -a
*master // local branch
develop // local branch
remotes/origin/HEAD -> origin/master
remotes/origin/master
remotes/origin/develop
Ordner umbenennen
git mv <old name> <new name>
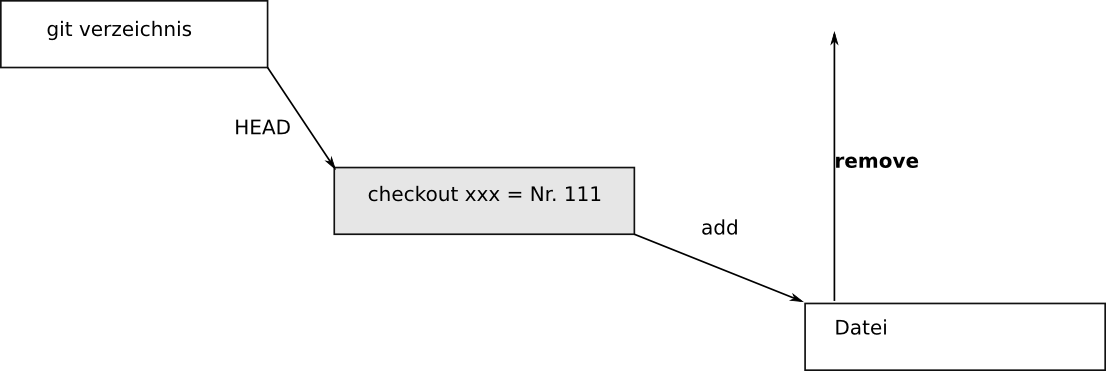
Lokale Datei aus aktuellem Verzeichnis nehmen
Das Git-Verzeichnis befindet sich immer in einem Zustand. Dies ist eine spezifische Commit-Nummer. Will man eine Datei nicht mehr nachverfolgen, bedeutet dies, dass man die Datei aus diesem Arbeitsverzeichnis nimmt.
git remove <file> Dieser Befehl ist das Gegenteil von
git add <file>
Git remove bezieht sich nur auf das aktuelle Verzeichnis. Ist die Datei bereits eingechecked, so ist sie in alten Versionen noch da.
Push auf Repository rückgängig machen
git log
git revert <beginn der aktuellen commit-nummer>
Der aktuelle Commit findet man mit git log. Danach kann man diesen commit mit revert rückgängig machen. Es besteht wieder der Zustand vor diesem commit.
Add rückgängig machen
git reset HEAD <Verzeichnis>
Hat man lokal zuviel zum Committen getan, geht mit diesem Befehl die Datei zurück in untracked (und wird wieder rot).
Ordner aus Repository entfernen (remote)
git rm -r --cached <directory>
git commit -m "Ordner aus Github genommen"
git push origin master
Hier wird der Ordner aus dem Repository genommen (dort gelöscht), aber lokal gelassen. Grund dafür ist die Zeile –cached.
Ordner aus Git entfernen (lokal und remote)
git rm -r <directory>
git status: deleted <directory>
git add <directory>
git commit -m "löschen eines Ordners lokal und auf Github"
Der Ordner existiert lokal nicht mehr. Soll er auch auf Github nicht mehr existieren, muss die Lösch-Meldung gepushed werden.
Alte Datei von Repository holen
git checkout <commit-nr> <pfad>/<file>
Achtung: Die Datei wird lokal genau nach Pfad abgelegt. Liegt dort eine aktuelle Datei, wird diese überschrieben. Man muss zuerst die akutelle Datei umbenennen.
Website mit wichtigsten Befehlen